
Activity Feed › Discussion Forums › Strictly Surveying › averaging observations after calibrating site
averaging observations after calibrating site
Posted by cole on July 24, 2019 at 9:16 pmwhen setting up a job with GPS (off the VRS) i typically observe all control points for 3 minutes, then take two that span the scope of the site (preferably in a line such as a prop line, section line…)and use those to calibrate horizontal. then ill use a city benchmark to establish vertical control. however, sometimes i find when i come back the next day to start staking improvements, i will have variances of up to a tenth, mostly vertical, but sometimes 5 hun or so horizontal as well. to improve accuracy, before staking improvements i will re observe all control with 3 min obs and avg the shots. today, i noticed the coords did not change at all though for my point that i had previously used as horizontal calibration.
my question is, once you calibrate the site, are those points that are used in the calibration not affected by averaging observations? if not, does this make avg control points a bad idea, as those used in the calibration may deviate more from those that are averaged multiple times through different 3 min obs? thus, creating more discrepency between control used in calibration, and control not used in the site cal?
only been at it for 2 years now and im thrown to the wolves with no mentor, so i gotta figure stuff out solo.
thanks , cole
MightyMoe replied 2 years, 1 month ago 13 Members · 21 Replies- 21 Replies

Not sure what software you are using, but most major brand software (I know Trimble Access for sure) does not recalibrate on the fly when control points are re-observed. The idea is that all points are observed to desired precision, and then as many as possible are used in the calibration to minimize residuals. (It is highly recommended to use more than just two points. Four points spaced around the exterior of the site is the rule-of-thumb minimum.)
Once the calibration is computed, it is just a set of transformation parameters to go directly from the raw GNSS measurements to local values, so it is not “looking at” the control points any more. So it will not change until you tell it to re-calibrate.
Re-calibrating can be VERY dangerous if you are in the middle of performing stakeout. Read up on how your software handles it before making that decision. Changing a calibration midway through a job is dicey at best.
Also, it all depends on what you are doing, but 0.05′ horizontal and 0.10′ vertical is pretty great for RTK, even network RTK. Well within tolerances, at least in the areas that I have worked…
“…people will come to love their oppression, to adore the technologies that undo their capacities to think.” -Neil Postman
There was a recent post about the accuracy of VRS. It seems the general consensus is the vertical accuracy is not as good as a base rover system. We just bought a VRS system and I agree it??s not as accurate as base rover. It also depends on the quality of the VRS systems and how close some bases are.
I also agree I wouldn??t change a calibration once done. I??d also say a calibration doesn??t increase the accuracy of a VRS. I rarely calibrate any more unless forced to by control not on state plane.
 Posted by: @david-livingstone
Posted by: @david-livingstoneI rarely calibrate any more unless forced to by control not on state plane.
Just curious, but what does “state plane” have to do with anything.
Loyal

That should probably read “not referenced to the same datum as the VRS and on a well-defined projection that the data collector can handle.”
.
i guess what im thinking is to use 2 points and create that baseline to which everything else is relative. if i do 4 point calibrations, then i have deltas between calc points and all of my observed points. (i am open to new techniques, please explain why more points are better). having a tenth here or there vertically is not compliant by my standards, especially when providing benchmarks for contractors who are using that to build a finished floor. even flowline of gutter or gravity flow pipe may be staked incorrect if your setup is a tenth off vertically. probably wont wreck a site or anything, but def gets my OCD going. again, im only 2 years in, i may be wrong about everything i just wrote.
I was bringing up state plane because I wasn’t sure the OP thought maybe doing a calibration would make the VRS better and more accurate instead of working in state plane coordinates. I’m not sure if that was what he was thinking or not.

Straight line calibrations can be very dangerous when working in an area off the line which in most cases should be most of your work area. Your horizontal calibration points should fully surround your work site. I despise calibration projects and will only calibrate as a last resort which is usually once maybe twice a year.

Ok, this is a question of calibrating existing control that you didn’t set?
If that is the question, here is basically what a calibration does.
The original control has some error, maybe it’s small, maybe not, it may be significant.
The VRS has some error, it’s difficult to know just how much unless you have spent time figuring that out, that should be small, but sounds like it’s time dependent.
Your RTK/VRS survey has some error, that is dependent on the quality of your survey.
You then put these three errors (actually there is more but we will call it three for this discussion) in a pot and stir them up, what comes out is probably not all that tasty.
Two points is not a good idea to use as a calibration (it shouldn’t be considered a calibration). The two points will always look good even if they aren’t, kinda like the pretty or handsome date that turns out to be a psycho.
Do you have the ability to use a base/rover on these surveys? Eliminate the VRS, eliminate the calibration and use the site control as it was meant to be used?
If these points are control you are setting then I’m lost.
The reason i have to calibrate is that my office provides calc points for things like building grids, curb, pipe….they are all relative usually to a previous boundary survey, but the coordinates they provide me need to be localized. so i have to find one that im positive is the search point in the search file, and occupy it, then calibrate the grid point with my GNSS obs point. one point obviously doesnt work well enough, as it only gets me a couple feet or so to the next search point. once i calibrate to a second search point, all other search points usually get rotated/shifted correcetly and fall within a tenth or so of where they should be when i stakeout. I observe some of these existing points (rebar w/caps, rebar, nail/disc) and storing them in my job with my own point # (different than the search point provided by the office) and after setting some of my own as well for conveniecnce. my question is, the next time i come out, when i stakeout to check into a control point, sometimes im reading .05 – .1 deltas. so i reobserve these points and avg them together, which seems to bring everything closer together. BUT the points that i used as my horizontal calibration, their coords do not change at all, and i was worried that since they are statying the same and my other points are changing slightly, that this would cause more of a variance between them. probably overthinkging this.

Isn’t calibration a mechanism, such as localize?
If I’m hearing you right…
Day one, we go establish control.
Day two, we calibrate, or localize to this control.
Day 3, we wonder what happened, mechanicaly. (What’s meta data?)
Day 4, we post on the forum.
Day, 5 is day one, next project….
N
Your office is setting you up for a disaster. Maybe not today or tomorrow but someday for sure. Your office should send you out with crystal clear direction and data.
I understand you are relatively new and have been weaving your way through the maze of VRS-GPS-OFFICE-CALIBRATION processes with little to know training and I applaud you for getting this far without any major issues!
The office should be setting you up with a GPS file on the proper coordinate system with the proper project scale factors already established. It seems like all of your projects are independent in terms of coordinates and have no relationship to one another, control or data-wise. The beauty of the VRS and GPS is that all your data can be on the same coordinate system(s). This, of course, takes proper setup in the office and in the field but once setup you’ll wonder why you didn’t do it sooner.

I’m thinking if a tenth of a foot vertically isn’t good enough for you or the project, you shouldn’t be using RTK to perform the survey. RTK is great and cool, but it’s just a tool. If the tool can’t perform the job correctly and safely, use a tool that will. Site calibrations, in simple terms, best fits your measured data to the record values of the same reference points. Maybe think of it this way, using more points in the calibration increases your confidence level of the entire project being acceptable for accuracy. If I hinge a job only on one point, my confidence level is quite low that the rest of the project is accurate. What if that one point was the only point that was disturbed by the night shift dozer operator? You need more points to calibrate to to increase your confidence that your work is accurate. It also allows you to see points that are not acceptable for accuracy, you have the ability to dismiss them. Calibration scales, rotates and translates your measured job data to a predefined coordinate system. When you calibrate using two points, the first point in the calibration translates your job data to that position. When you add a second point to the calibration, a rotation and scale is applied to the job data. When your measured inverse data does not match the record inverse data ( and it most likely will not) this is when a scale factor is applied, ideally you would want this scale factor to be as close to zero as possible so when you lay something out at 200 feet, it will measure 200 feet.

Please take this in the spirit intended. Maybe what you need most is to slow down a bit and organize your thoughts. Counterintuitively, offering to work for free may make you seem unworthy of the effort – like you may be a burden to carry. Stress your capabilities instead and build on them.

I don’t know if this will help at this point. An excellent LDP can be designed without any field work. The maximum distortion is mostly dependent on topography height inside the limits of the projection. If you want to calculate search points etc. obviously you need to know LDP coordinates of a start point. If you are fortunate enough to have coordinates on that point related to some other geographic coordinate system such as state plane the conversion can be made in most survey software without any field work. If not, the best bet is to survey the LDP coordinates first and go from there.
Here is an example of designing an LDP for a small 3500 m area.
The lat and long and approx. height of three random points at the site need to be known. Although not required I prefer to work in NAD83 datum – the same datum NGS uses for its datasheets. In this example I used two GSVS datasheets for the information but I could have just as easily used Google earth to randomly select a lat, long and height. I try to select a higher and lower point near the limits of the site and a check point somewhere near the center.
To determine parameters for the projection I use the 3dInverse tool NGS provides. Here are the results. Note the height difference is about 60m. Not a problem.
Output from INVERS3D
First Station : GSVS 074
—————-
X = -329999.3843 m LAT = 42 1 46.60047 North
Y = -4733533.2329 m LON = 93 59 16.57095 West
Z = 4248250.0517 m EHT = 302.5500 MetersSecond Station : GSVS 076
—————-
X = -326924.4868 m LAT = 42 1 58.74145 North
Y = -4733452.3353 m LON = 93 57 3.46597 West
Z = 4248489.7754 m EHT = 245.0020 MetersForward azimuth FAZ = 83 0 44.6726 From North
Back azimuth BAZ = 263 2 13.7913 From North
Ellipsoidal distance S = 3084.6198 m
Delta height dh = -57.5480 m
Mark-to-mark distance D = 3085.2887 mDX = 3074.8975 m DN = 375.2719 m
DY = 80.8976 m DE = 3061.8262 m
DZ = 239.7237 m DU = -58.2928 mZenith (mk-to-mk) ZD = 91 4 57.36
Apparent zenith distance = 91 4 50.24Mark to mark dist sqr – delta heigt diff sqr = ground dist 3084.752 m
Ellispoid dist / Ground dist = ground scale 1.00004278
This scales the ellispoid bigger in the projection by 1.00004278 raising it to average ground height of the local site.Transverse mercator is the easiest type of projection to work with in a small area. Lambert is preferred for a large projection that runs mostly east and west. Most field software will support custom projections of either type. If it doesn’t its not very good software.
So here are suitable parameters for this area based on the above.
Datum: NAD83
Projection Type: TM
Central Meridian: LAT = 93 58 00.00000 West (mid site)
Scale: 1.00004278
Lat Origin: 42 01 50.00000 North (mid site)
False N = whatever
False E = whatever
Any previously surveyed point having NAD83 coordinates (lat long) can be user input into this system giving you LDP coordinates. Although these are LDP grid coordinates they can also be used as ground.
We do not use lambert for LDPs simply cause some available programs don’t play well with it. I was an advocate of LDP’s early on but found that many users I connect with are unable to use them, so I always try and place projects in SPC unless it’s the Lambert in Montana which can be so extreme that’s it almost unusable. 4d rotations with 800ppm for distances makes it iffy at best.
But every once in a while it’s requested.

@mightymoe you kidding right? Calibrating to points set 100 years ago. I just want to get on the same bearing system and trans late my calculated search points to the old survey so I can search for their corners. Walk in their steps so to speak. I don’t want “no black box” messing with my data.
- Posted by: @mightymoe
We do not use lambert for LDPs simply cause some available programs don’t play well with it.
Weird. I’d be curious which programs can’t work with Lambert. Oblique Mercator I can understand, but LCC and TM are just basic.
The only issue with a Lambert LDP might be that its native form is single-parallel, but the equivalent two-parallel definition can easily be calculated.
All the NATRF2022 Lambert projections will be single-parallel definitions, so if their software doesn’t handle them now, they’re not going to be able to work in SPC when the new datums drop…
“…people will come to love their oppression, to adore the technologies that undo their capacities to think.” -Neil Postman TBC is one, when you design an LDP using it, it will default to a Transverse Mercator for the design of the LDP. Can you do a Lambert in TBC?
I’m not really sure.
I know I was able to fool some programs to accept a Lambert projection but it never seems to be worth the effort. State wide zones aren’t what I’m interested in.
- Posted by: @mightymoe
TBC is one, when you design an LDP using it, it will default to a Transverse Mercator for the design of the LDP. Can you do a Lambert in TBC?
I’m not really sure.
I know I was able to fool some programs to accept a Lambert projection but it never seems to be worth the effort. State wide zones aren’t what I’m interested in.
TBC will definitely default to creating a TM when doing a site calibration without an original defined projection, but there’s nothing stopping us from creating an LDP in the Coordinate System Manager.
I have created TMs, 1P and 2P Lambert LDPs, as well as the odd Oblique Mercator too.
Here’s what I have for projection options:
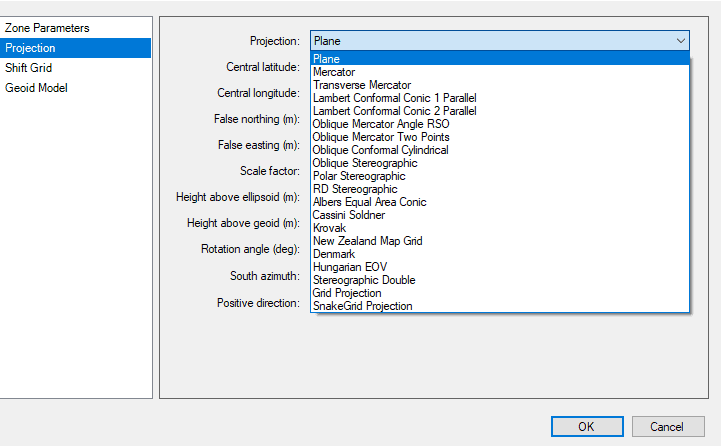
We often have to find the equivalent in other programs. We deliver in C3D, ORD, MicroStation, ESRI SHP/GDB, etc.
“…people will come to love their oppression, to adore the technologies that undo their capacities to think.” -Neil Postman 
@mightymoe What do you mean about fooling TBC into accepting a Lambert projection? I’ve found it pretty straightforward to enter Lambert parameters in TBC Coordinate System Manager.
Edit: What @rover83 said…



Log in to reply.